Belt drives are made using two pulleys linked by a belt, usually made of rubber. Their main application is to transmit force/torque over longer distances, when gears would be too inefficient/expensive. In a classic belt drive, the belt attaches to the pulley via friction.
Some main strengths and drawbacks of belt drives are:
- Can transmit torque and energy across long distances.
- Relatively low cost, as the belt material is generally cheaper than metal (to make gears)
- However, Belts can slip due to reliance on friction between the belt and pulleys, thereby limiting torque and speed. Friction can be improved by choice of material or using a toothed belt.
- Belts can stretch, reducing their effectiveness. This can be overcome with idler or tensioner pulleys, but this reduces the efficiency.
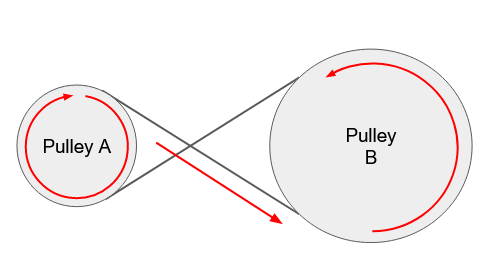
Belt drives normally all rotate the same direction. To achieve different directions of rotation, the belt can be crossed into an infinity shape
MA & VR
Formula
Belt drives use pulley ratios, that is, the ratio between the diameters of two pulleys linked by a belt drive to calculate mechanical advantage:
Belt drives operate very similarly to gears, and hence concepts in gear systems can also be applied to belt drive systems, such as:
- In a belt drive between two differently sized pulleys the larger pulley moves slower. So if the larger pulley is being driven, then the MA > 1, and vice versa.
Deriving the Formula
Compound Pulleys
Just like with gears, pulleys can be attached on the same axle/shaft to share the same rotational speed. Used to be more compact and cheaper, the net pulley ratio of a compound pulley system is simply the produce of the individual pulley ratios: